










Serviços Personalizados
Journal
Artigo
 Português (pdf)
Português (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Acessos
Acessos
Links relacionados
-
 Similares em
SciELO
Similares em
SciELO
Compartilhar

 Permalink
PermalinkRevista de Ciências Agrárias
versão impressa ISSN 0871-018X
Rev. de Ciências Agrárias vol.39 no.2 Lisboa jun. 2016
https://doi.org/10.19084/RCA15147
ARTIGO
Tecnologia GNSS de baixo custo na monitorização de ovinos em pastoreio
Low-cost GNSS technology for monitoring grazing sheep
Elvira Sales-Baptista1,2, Maria Isabel Ferraz-de-Oliveira1, Margarida Brandão dos Santos3, José António Lopes de Castro1,2, Alfredo Pereira1,2, José R. Marques da Silva1,4, João Serrano1,4
1 Instituto de Ciências Agrárias e Ambientais Mediterrânicas, Universidade de Évora, Pólo da Mitra, Ap. 94, 7006-554 Évora, Portugal;
2 Departamento de Zootecnia, Pólo da Mitra, Ap. 94, 7006-554 Évora, Portugal;
3 Mestrado em Engenharia Zootecnia, Departamento de Zootecnia, Pólo da Mitra, Ap. 94, 7006-554 Évora, Portugal;
4 Departamento de Engenharia Rural, Pólo da Mitra, Ap. 94, 7006-554 Évora, Portugal. *E-mail: elsaba@uevora.pt
RESUMO
As pastagens naturais e biodiversas que suportam a pecuária extensiva são caracterizadas por marcada variação da biomassa das espécies botânicas presentes, e do seu estado fenológico ao longo das estações do ano. Nestas circunstâncias, a utilização do alimento e a ocupação do espaço da pastagem podem ser muito heterogéneas devido, entre outras causas, ao comportamento de pastoreio dos ruminantes. Uma gestão eficiente do pastoreio exige conhecimento sobre o mecanismo de ajuste do comportamento de pastoreio à pastagem. Embora exista tecnologia GNSS que possibilita a monitorização do comportamento de pastoreio, o seu custo de aquisição é elevado, limitando a sua aplicação a ensaios científicos.
O presente trabalho revê os princípios que permitem a aplicação desta tecnologia e tem por objectivo estudar a utilização de recetores GNSS comerciais de baixo custo ("commercial of the shelf – COTS: CatTrackTM). Foram utilizados seis recetores, durante seis períodos de recolha de dados, ao longo de dois meses de pastoreio contínuo de uma pastagem natural tendo sido a exactidão dos recetores de 14m e de 40m em testes estáticos e dinâmicos, respectivamente, a precisão de 3m e a fiabilidade de 80%.
O equipamento testado permitiu diferenciar as actividades dos animais (pastoreio, repouso e trânsito), determinar a localização de ovinos em pastoreio, e caracterizar padrões, percursos e zonas preferenciais. Conclui-se que o equipamento COTS apresenta uma elevada relação qualidade/preço, pelo que pode vir a ser uma ferramenta importante para suporte das decisões que são essenciais a um maneio mais preciso da pastagem.
Palavras-chave: comportamento de pastoreio, maneio de pastagens, pecuária de precisão, rastreamento de animais, recetores de GPS
ABSTRACT
Extensive livestock production is supported by natural and biodiverse pastures, characterized by marked seasonal variation of biomass, plant species and growth stage. The use of the food resources and the occupation of grazing space can be very heterogeneous in such conditions due to ruminants grazing behaviour. Successful grazing and pasture management requires an understanding of the adjustment mechanism behind the grazing behaviour that enables adaptation to grazing conditions. Use of GNSS technology allows grazing data collection but although available, is expensive, limiting its application for research purposes. This paper reviews the principles for the application of this technology and was designed to study the use of inexpensive commercial GNSS receptors (commercial of the shelf - COTS: CatTrackTM"). Six receivers were used for six periods collection data over two months of continuous grazing on a natural pasture. The accuracy of the receivers is 14m and 40m in static and dynamic tests, respectively. The precision was 3m and the reliability 80%. The tested equipment differentiates between animal activities (grazing, resting and transit). It also determines sheep locations, allowing the characterization of patterns, pathways and preferred areas. It is concluded that the COTS equipment has a high quality / price ratio, so it can become an important tool to support the decisions that are essential to a more precise pasture management.
Keywords: animal tracking, GPS collars, grazing behaviour, pasture management, precision livestock management.
Introdução
O estudo da dinâmica espacial dos animais domésticos, ou seja, o modo como usam e interagem com o seu ambiente, é a base a partir da qual se podem desenvolver práticas sustentáveis de maneio das pastagens. Esta abordagem implica o conhecimento da localização e das deslocações dos animais em pastoreio. Para tal é necessário que os movimentos dos animais sejam monitorizados, referenciando-os em termos de espaço e de tempo. As metodologias utilizadas para esta monitorização têm evoluído ao longo do tempo desde a observação direta até ao recurso a métodos indiretos, como a telemetria ou os sistemas de navegação global por satélite (GNSS). Uma característica comum a todas as metodologias é a necessidade de referenciar os animais individualmente.
O primeiro método de monitorização animal assentava na observação direta no campo recorrendo a sinais distintivos (características individuais como, por exemplo, padrões de pelagem, ou identificações artificiais, tal como marcas coloridas), sendo os animais seguidos e a sua posição estimada em relação a características da paisagem (Altmann, 1974). Este tipo de monitorização, para além de ser um método dispendioso e trabalhoso, pode apresentar erros que resultam da influência da proximidade do observador nos padrões dos movimentos naturais do animal. Mais tarde, na década de 60, os animais passaram a ser seguidos através de sinais de rádio VHF (Very High Frequency), o que permite a ecolocalização eletrónica por telemetria, sem necessidade de visualizar os animais (Cochran e Lord, 1963; Heezen e Tester, 1967). Este sistema é constituído por um emissor colocado no animal, que emite sinais rádio entre 27 e 401 MHz, o que permite utilizar diferentes freqências para diferentes animais. Estas frequências são captadas por um operador colocado no terreno, usando uma antena de receção direcional acoplada a um recetor. A posição do animal é estimada por triangulação, usando a interseção de leituras do sinal captadas em três locais distantes.
Algumas das limitações dos dois sistemas anteriores (observação directa e VHF), nomeadamente a dificuldade em seguir movimentos dos animais ao longo de grandes áreas foram superadas quando se passou a utilizar a localização baseada em satélites. Esta técnica começou a ser aplicada em 1978 com o sistema ARGOS (http://www.argos-system.org/) que é um sistema idêntico ao VHF, mas em que o sinal é recebido por satélite, sendo a posição do animal determinada a partir do efeito Doppler - fenómeno físico baseado na variação da frequência do sinal recebido relativamente ao emitido, que é função da distância entre o recetor (satélite) e o emissor em movimento (animal). Tal como no VHF, a precisão de localização é baixa, com erros de localização de centenas de metros (Turner et al., 2000).
A precisão de localização foi grandemente melhorada com o uso do sistema de navegação global por satélite (GNSS), atingindo-se precisões inferiores a 5 metros (Agouridis et al., 2004). Dos dois sistemas de navegação baseados em satélites existentes atualmente (GPS-NAVSTAR americano e GLONASS russo), o sistema americano, vulgarmente conhecido por GPS (Global Positioning System) é o mais utilizado na monitorização de animais (Anderson et al., 2013). Outros sistemas de navegação ainda não estão plenamente operacionais, como o GALILEO europeu, que é um projeto civil da Agência Espacial Europeia que deverá estar concluído em 2020.
Ao contrário do VHF e ARGOS, com o sistema GNSS o animal é equipado com um recetor, que recebe sinais dos satélites em órbita, determinando, assim, a posição exata do animal. O recetor mede a hora de chegada do sinal e, utilizando a velocidade média de propagação do sinal na atmosfera, transforma o diferencial de tempo em distância. O conhecimento da distância do recetor a pelo menos de três satélites permite o cálculo das coordenadas geográficas (latitude e longitude) (Turner et al., 2000; Townshend et al., 2008) da posição do animal. A aquisição e o armazenamento de dados é automático, o que permite a sua posterior transferência para uma base de dados, através de um cabo USB, ou remotamente.
A monitorização de animais através do sistema GPS foi aplicada pela primeira vez na localização de espécies selvagens em 1988 (Fancy et al., 1988), e nas espécies domésticas em 1992 (Rutter et al., 1997). Desde então esta tecnologia tem vindo a ser cada vez mais utilizada no estudo das espécies domésticas, para conhecer melhor o comportamento animal, nomeadamente a escolha de áreas específicas (home range) ou as preferências de pastoreio (Turner et al, 2000; Ganskopp, 2001). O interesse na monitorização e análise dos percursos que os animais realizam em pastoreio assenta em duas perspetivas: (i) no impacto que tem ao nível da tomada de decisão para a gestão de empresas agropecuárias; (ii) no contributo que pode dar para a compreensão do comportamento animal e das relações que os animais mantêm entre si e com o meio ambiente que os rodeia (Janssen, 2013). Por exemplo, através da associação das localizações a sistemas de informação geográfica (SIG), combinando esta informação com índices de paisagem e com deteção remota é possível criar classes de comportamento e de seleção de recursos (Barbari et al., 2006; Laca, 2009).
Simultaneamente às inúmeras possibilidades de aplicação da geo-referenciação dos movimentos animais, continuam a existir limitações importantes ao uso generalizado desta tecnologia, nomeadamente o tempo de vida das baterias, a necessidade de transferência dos dados e o elevado preço da maioria dos equipamentos disponíveis comercialmente (Lotek: http://www.lotek.com; Followit: http://www.followit.se; Telemetry solutions: http://www.telemetrysolutions.com).
O objetivo deste trabalho foi desenvolver um estudo pioneiro em Portugal com ovinos em pastoreio, para avaliação de recetores comerciais GPS de baixo custo (commercial of the shelf - COTS), para utilizar como alternativa aos recetores existentes no mercado para estudos de investigação. Foi testada a precisão dos recetores e foi analisada a sua capacidade para monitorizar os animais em pastoreio.
Materiais e métodos
Caracterização da parcela experimental
O ensaio foi conduzido numa parcela experimental, de aproximadamente 7 hectares, localizada na Quinta da Silveira (latitude 38,6218119º N; longitude 7,9462648º W), em Évora, Portugal. As coordenadas geográficas dos limites exteriores da parcela e dos principais detalhes diferenciadores do terreno foram recolhidas utilizando o equipamento GPS Trimble Geoexplorer 6000 (Trimble Navigation Limited Sunnyvale, California, USA) (Figura 1).
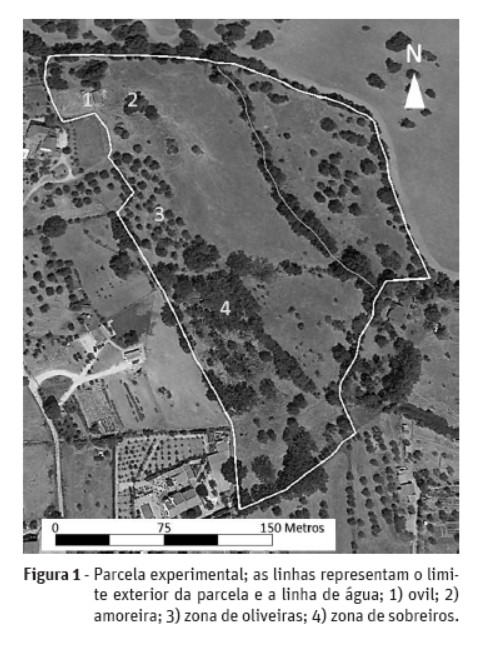
A parcela é constituída por uma pastagem natural, maioritariamente sem coberto arbóreo, tendo, no entanto, uma pequena área sob olival tradicional (Olea europaea) e uma outra sob montado de sobro (Quercus suber).
A parcela é atravessada por uma linha de água na sua zona de cota mais baixa e tem duas encostas suaves com orientação Sudoeste (SW) e Nordeste (NE). O solo é de tipo granítico com alguns afloramentos rochosos.
O ensaio decorreu entre 13 de Abril e 21 de Junho de 2013 e, ao longo do período experimental, registou-se uma temperatura do ar média de 18,1°C, com uma amplitude térmica entre 1,9°C (Abril) e 39,6°C (Junho). A precipitação média mensal desta zona é de 48,8 mm (Instituto Português do Mar e da Atmosfera, em https://www.ipma.pt/pt/oclima/normais.clima/1981-2010/007/).
A pastagem natural apresentava predominância de gramíneas (e.g. Agrostis spp., Polypogon spp., Cynodon dactylon, Holcus lanatus), com a presença de compostas (Tolpis barbata) e com algumas ilhas de leguminosas (Trifolium spp.). Para além dos sobreiros e oliveiras existem ainda choupos (Populus spp.) e freixos (Fraxinus excelsior) distribuídos ao longo da linha de água e uma grande amoreira (Morus rubra). Algum mato, sobretudo esteva (Cistus spp.) encontrava-se sob a copa dos sobreiros.
A parcela possui um ovil coberto, com parque de maneio e manga.
Animais
Foram utilizados 6 ovelhas da raça Merino Branco, com peso vivo médio de aproximadamente 50 kg. Os animais utilizaram em permanência a parcela experimental descrita acima e foram equipados individualmente com um arnês (Figura 2a) para suporte dos recetores GPS (descritos na secção seguinte – Recetores GPS) e treinados para retornar ao ovil para recolha e substituição dos recetores.
Recetores GPS
Características dos recetores GPS
Foram utilizados recetores GPS comerciais (COTS) modelo CatTraGTM (Perthold Engineering LLC, Anderson, USA; http//:www.mr-lee-catcam.de) (Figura 2a). Os recetores com uma dimensão de 4,7 cm × 3,0 cm × 1,3 cm e uma massa de 21 g, são à prova de água e têm uma bateria interna de iões de lítio, recarregável, que permite a utilização do equipamento durante um período de tempo que depende da frequência de recolha de dados definida. Para amostragens de 30 em 30 segundos, a autonomia da bateria é de 30 horas. Neste estudo foram realizadas recolhas de 5 em 5 minutos, o que confere aos recetores uma autonomia de 4 dias. Os recetores são programados e sincronizados recorrendo a um software gratuito disponível na Internet @trip pc (http://www.a-trip.com) (Figura 2a). O mesmo software pode também ser utilizado para descarregar os dados de localização de cada recetor para um computador em formato csv (coma-separated values), que pode ser aberto em qualquer folha de cálculo. Os dados incluem informação sobre a data, a hora, as coordenadas geográficas (latitude e longitude), a altitude, a velocidade e a distância à última posição registada (Figura 2c). A transferência de dados e o carregamento da bateria interna dos recetores é feita através de uma porta USB (Figura 2a).
Colocação dos recetores
Nos primeiros testes efetuados os recetores foram acoplados a coleiras. Recorreu-se à utilização de pesos nas coleiras de forma a evitar o movimento rotacional das mesmas procurando manter estável a posição dos localizadores na parte superior e a visibilidade constante entre os recetores e a rede de satélites. No entanto, verificou-se que esta não era a melhor solução uma vez que os recetores tinham tendência a deslocar-se. Optou-se por usar um arnês XLarge de neoprene (Hagen, Dogit, Baie dUrfé, Canadá), ajustável (25 mm × 65-103 cm - 85-120 cm), ao qual se prendeu uma bolsa de nylon com fecho eclair, onde se colocou o recetor GPS (Figura 2d). Este sistema além de manter a posição do recetor estável facilita a recolha do equipamento.
Exatidão e precisão estática dos recetores
A a exatidão e a precisão dos equipamentos utilizados neste trabalho foram avaliadas em condições estáticas e em condições dinâmicas.
O termo exatidão diz respeito à proximidade entre a localização obtida e o valor real dessa localização, enquanto que o termo precisão diz respeito ao grau de variação de um conjunto de localizações obtidas repetidamente sob as mesmas condições experimentais, relativamente à localização média.
A exactidão e a precisão estática de cada um dos recetores foi avaliada colocando-os em cima de um poste de madeira com cerca de 1 metro de altura e com coordenadas geográficas (latitude e longitude) conhecidas, tendo o cuidado de utilizar a posição recomendada pelo fabricante (com a face da antena voltada para cima), durante 24 horas. Os recetores foram programados para registar leituras de posicionamento com intervalos de 5 minutos, tendo sido recolhidas 288 posições para cada equipamento. Este procedimento foi executado num local a céu aberto e repetido num outro local debaixo da copa de árvores. Foi calculado o desvio de cada posição recolhida relativamente à posição geográfica real dos locais em que foram posicionados os recetores (exatidão). Após eliminação dos 10 % de leituras mais afastadas
(consideradas aqui outliers) da posição geográfica real, foi calculado o desvio padrão dos restantes 90% das posições recolhidas por cada equipamento relativamente à posição média (precisão).
Exactidão dinâmica dos recetores
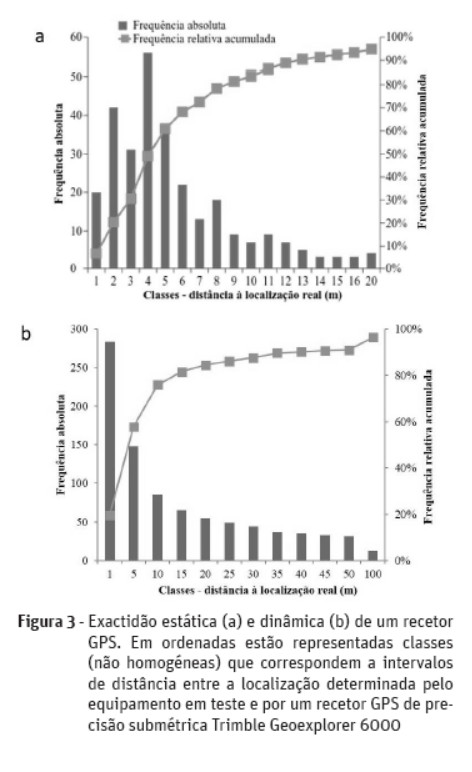
A exatidão dinâmica dos recetores foi testada simulando um percurso de deslocação das ovelhas, a uma velocidade de cerca de 0,4 m/s que incluiu trajetos lineares e em zig-zag e trajetos a céu aberto e sob a copa das árvores. Os recetores foram programados para recolher localizações com intervalos de 1 minuto e percorreram o trajeto durante uma hora em simultâneo com um recetor GPS de precisão submétrica Trimble Geoexplorer 6000 (Trimble Navigation Limited Sunnyvale, California, USA) que funcionou como referência. Foram recolhidas cerca de 360 posições no total dos recetores. Foram calculados os desvios de cada posição recolhida relativamente à posição geográfica obtida pelo recetor de referência, para o mesmo percurso.
Recolha, tratamento e análise de dados dos recetores GPS
A recolha de dados foi feita em 6 períodos distintos, entre 13 de Maio e 21 de Junho de 2013. Em cada período de quatro dias de recolha de localizações apenas foram utilizados para efeitos de tratamento os dados obtidos nos dois dias centrais, ultrapassando a variação do horário de início e de fim das recolhas em cada período e garantindo que a atividade e localização dos animais não eram influenciadas pela presença humana.
No fim de cada período, os recetores foram retirados dos animais e a informação recolhida foi descarregada para um computador e exportada para um ficheiro Excel.
Com os dados descarregados construiu-se um ficheiro em que apenas se consideraram a data, a hora e as coordenadas geográficas (latitude, longitude) da localização do animal As coordenadas geográficas da localização dos animais, foram posteriormente transformadas em coordenadas retangulares (Este, Norte) pela aplicação do sistema de projeção cartográfica mais adequado à zona em estudo. A hora de recolha de cada localização, descarregada dos recetores sob o formato HH:MM:SS (hora:minuto:segundo), foi transformada em total de segundos, sendo o momento do primeiro registo de todos os recetores considerado como tempo zero. Deste modo, obteve-se um referencial comum de tempo para o total do ensaio e para todos os recetores, o que permite fazer comparações temporais.
A partir dos dados iniciais, foram calculadas as distâncias (m) e velocidades (m/s) entre pares de localizações sequenciais.
Para identificar e eliminar posições erróneas, foram utilizados filtros recorrendo ao software ArcGIS ( version 10.2.1, Esri, Redlands, California, USA). Todas as localizações exteriores ao limite geográfico da parcela experimental foram eliminadas, assim como todas as localizações em que o ponto de chegada resultava de uma velocidade de deslocação estimada superior a 2,5 m/s, considerada neste estudo como o valor limite aceitável para o deslocamento dos animais em pastoreio
Os dados de localização dos animais foram separados e organizados hora a hora e foram definidas atividades de pastoreio com base nas velocidades de deslocamento (VD): (i) VD < 0,1 m/s: animais em repouso; (ii) 0,1 m/s > VD < 0,4 m/s: animais em pastoreio; (iii) VD > 0,4 m/s: animais em deslocamento entre zonas da parcela (Schlecht et al., 2004).
Resultados e discussão
Exatidão estática e dinâmica dos recetores
Os resultados dos testes estáticos e dinâmicos apresentam-se na Figura 3. Apesar do fabricante referir tratar-se de um equipamento de alta sensibilidade, não refere valores de exatidão estática ou dinâmica. A exatidão estática dos recetores foi, em média, de 14 metros (90% das localizações apresentavam um desvio inferior a 14 metros da localização real). Na Figura 3 apresenta-se o histograma com os desvios das localizações recolhidas e frequências acumuladas. A exatidão diminuiu para 40 metros, em média, quando as localizações foram testadas em condições dinâmicas (com intervalos mais curtos - 1 minuto - e com velocidades de deslocação superiores a 0,4 m/s) (Figura 3b). A precisão calculada nas mesmas condições foi de 3,2 metros.
Estes valores não são muito diferentes de outros equipamentos disponíveis no mercado.
No Quadro 1 é possível comparar algumas das características entre o tipo de recetor GPS utilizado neste estudo e o recetor Lotek GPS 3300SR, utilizado como termo comparativo por se tratar de um dos mais frequentemente utilizados em estudos de monitorização animal (Di Orio et al., 2003; Hansen e Riggs, 2008).
Fiabilidade dos registos
Entende-se por fiabilidade o grau com que um método de recolha de dados produz resultados estáveis e consistentes, que podem ser replicados.
Durante todo o período de ensaio e no conjunto dos 6 recetores, foram recolhidos cerca de 21000 dados das posições referenciadas dos animais. No entanto, nem todos os recetores apresentaram o mesmo número de leituras, tendo um dos equipamentos apresentado sistematicamente um menor número de registos, pelo que os seus dados não foram considerados. Após o processo de filtragem referido anteriormente, obtiveram-se 16714 registos, o que representa cerca de 80% do total de registos recolhidos.
Diferenças entre animais
Os ovinos são animais gregários, que apresentam um elevado grau de sincronização das atividades individuais (entre 60 a 80%, segundo Gautrais et al., 2007), ajustando o comportamento dos vários membros do grupo entre si (alelomimetismo ou imitação recíproca). No presente ensaio verifica-se que as localizações dos 6 animais monitorizados são muito próximas. No Quadro 2 são apresentadas as médias de 39 localizações de apenas 3 dos seis recetores utilizados, que tinham registos temporais coincidentes (exatamente no mesmo segundo). Para cada um destes tempos foram calculadas as coordenadas retangulares (E;N) médias dos 3 recetores, e a distância de cada um dos recetores a esse ponto médio (centróide).
Verificou-se que os animais se mantêm próximos, manifestando um comportamento de rebanho (afastamento médio entre animais de cerca de 8,5 metros), o que confirma as observações diretas no campo. Este comportamento é igualmente evidenciado na Figura 4a.
Este aspeto indicia a possibilidade de reduzir o número de recetores necessário para localizar um rebanho de ovinos em pastoreio (abaixo dos 16% de animais georeferenciados, com base no presente ensaio). Dado o elevado custo da maior parte dos equipamentos comerciais (entre 1500 a 2000 euros) é importante determinar o número de animais por grupo que necessitam de estar equipados com recetores de forma a descrever com rigor o comportamento do rebanho. A identificação de animais que exercem liderança na condução do rebanho pode orientar a escolha dos animais a referenciar com recetores GPS. No que diz respeito aos bovinos, por exemplo, Turner et al. (2000) referem uma redução do erro nas localizações de 40% para 10% quando 4 ou 5 animais são geo-referenciados em vez de apenas um, embora os bovinos apresentem um comportamento em pastoreio bastante diverso dos ovinos. Neste caso, o baixo-custo dos recetores CatTrack TM torna possível aumentar o número de animais geo-referenciados, dessa forma reduzindo o erro associado às localizações.
Identificação das atividades de pastoreio
A classificação das atividades comportamentais em classes diferenciadas foi realizada utilizando a velocidade média correspondente a períodos de 5 minutos, diferenciando-se 3 classes: repouso (ruminação e ócio), pastoreio e trânsito (considerado como deslocações sem pastoreio) (Quadro 3).
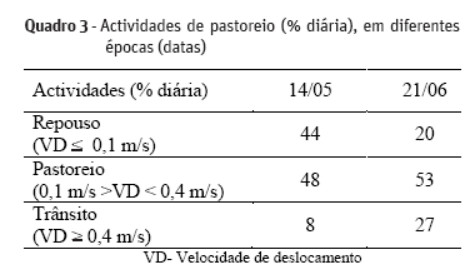
Ao longo da Primavera, com a modificação das condições climatéricas (diminuição da precipitação e aumento da temperatura média) e com o avançar do ciclo vegetativo das espécies vegetais que constituem a pastagem, verifica-se uma alteração das características da pastagem, as quais tiveram repercussões nas atividades de pastoreio (Quadro 3).
Estes resultados mostram que os animais pastaram cerca de metade do dia em qualquer das datas de avaliação. Com o decréscimo de qualidade da pastagem no final da Primavera (21/06), os animais reduziram o tempo de repouso e aumentaram o tempo de trânsito. Este aumento reflete a deslocação para áreas da pastagem anteriormente não pastoreadas e que se encontravam mais distantes da zona do ovil, área que os animais ocuparam preferencialmente. As zonas onde os animais passam a maior parte do tempo estão normalmente associadas ao conceito de home range, zonas que correspondem a maior ocupação espacial, preferidas porque aí encontram recursos importantes como alimento, água, sombra e proteção.
As diferenças entre as atividades estão exemplificadas na Figura 4b, em que se comparam registos equivalentes a períodos de 2 horas. Num caso, os animais encontravam-se em repouso, durante a noite (representado pela linha vermelha), noutro, estavam a pastar, efetuando deslocações lentas e ingerindo simultaneamente alimento (representado pela linha verde). Quanto mais pequenos os intervalos entre localizações, menores os erros na discriminação entre comportamentos. No entanto, o aumento da frequência de amostragem promove a redução do tempo de utilização da bateria. Uma vez que os episódios de pastoreio dos ovinos (tempo consecutivo a pastar sem que existam pausas entre registos superiores a 30 minutos) têm normalmente duração de 2 a 3 horas, é possível aumentar o intervalo entre registos, prolongando o tempo de recolha de informação.
Diferença entre datas – utilização da pastagem
A importância na utilização desta tecnologia para determinar o comportamento em pastoreio em função das características da pastagem é exemplificada na Figura 4c.
Os animais não usaram a pastagem uniformemente, concentrando-se em termos de repouso e alimentação preferencialmente numa zona que representava cerca de ¼ da pastagem. Essa foi a área considerada como home range, onde se concentraram 80% das localizações dos animais durante todo o período do ensaio (na Figura 4c a linha vermelha localiza-se na home-range). À medida que os recursos alimentares perderam qualidade (diminuição do valor nutritivo no final da Primavera), os animais aumentaram a distância ao seu home range, tendo diminuído o tempo de repouso e aumentado o tempo gasto em deslocações (linha verde na Figura 4c).
Observou-se que os animais demonstram comportamentos espaço-temporais distintos em duas épocas diferentes. A composição florística, a biomassa e o estado vegetativo da pastagem sofreram modificações marcantes durante o período de ensaio (cerca de 5 semanas). O comportamento de pastoreio modificou-se e verificou-se que os animais apresentavam outros padrões de movimentos (rotas e locais) e escolhiam outras zonas de pastoreio. Na Figura 4c observa-se que em junho (linha verde), os animais passaram a utilizar uma parte da pastagem que ficava do outro lado da linha de água, manifestando duas zonas distintas de actividade de pastoreio, e que se deslocavam entre elas durante o período diurno, enquanto que em maio (linha vermelha) permaneciam na home range.
Conclusões e perspetivas
A tecnologia GNSS possibilita obter conhecimento de atividades comportamentais dos animais e também obter informação sobre as interações entre animais e recursos alimentares, quase em tempo-real e à medida que eles se modificam. Para planear e desenvolver sistemas de gestão sustentáveis da pecuária extensiva, é essencial um melhor entendimento da forma como os animais ocupam e usam a pastagem, ou seja, qual a sua relação com as zonas de repouso, de segurança e de fornecimento de alimento e água.
Apesar do acesso à tecnologia GNSS ser fácil, o elevado preço dos equipamentos pode ser limitativo ao seu uso generalizado. É neste contexto que os equipamentos COTS podem representar uma alternativa interessante.
Os dados obtidos sugerem que recetores de baixo custo permitem obter informação com precisão, exatidão e fiabilidade. No entanto, aconselha-se que os recetores sejam previamente testados e que especial cuidado deva ser considerado na sua programação. Intervalos mais longos entre recolhas de dados permitem aumentar o período de acompanhamento e registo, sendo que a opção de uso deve ter em consideração a espécie animal em estudo. Com ovinos, a colocação e recuperação dos recetores é fácil, e para estudos comparativos entre datas, o presente equipamento pode ser útil e de fácil utilização, permitindo períodos de registo de pelo menos 3 dias consecutivos. Quanto à adaptação dos animais, verificou-se não ser necessário período de habituação prévio, uma vez que os animais se adaptaram bem à utilização de arneses. Os dados obtidos com o presente ensaio sugerem ainda que se pode reduzir o número de recetores a utilizar num rebanho de ovelhas, devido ao comportamento gregário destes animais. Existe necessidade de usar pelo menos 3 unidades por rebanho, por razões práticas, pois existe sempre a possibilidade de uma ovelha se distanciar ou de um recetor se perder. Quantos mais recetores forem usados maior poderá ser o tempo de vida das baterias, porque menos pontos serão necessários e podem ser programados em sequência. É igualmente possível ampliar o número de dias de amostragem, aumentando o intervalo entre recolha de registos.
No que respeita à pastagem, esta metodologia permite detetar zonas preferenciais dos animais, ou seja permite mapear zonas de maior utilização, o que possibilita uma gestão diferenciada, por exemplo mudando o local de distribuição de água, de distribuição de suplementos alimentares ou criando mosaicos de pastagem.
A monitorização do pastoreio utilizando tecnologia GNSS possibilita o conhecimento das decisões e preferências dos animais em função do seu ambiente, contribuindo para estimar a pressão de pastoreio, gerir o encabeçamento e melhorar a produção e o bem-estar dos animais.
Como conclusão final pode afirmar-se que este estudo mostra que o recetor GPS de baixo custo pode ser utilizados com bons resultados para medir as atividades e as localizações de ovinos em pastoreio.
Agradecimentos
Os autores agradecem a Luis Rato e Alexandre Cancela dAbreu por terem disponibilizado todas as condições necessárias para a realização do trabalho de campo. A autora M.I. Ferraz-de-Oliveira agradece a bolsa de Pós Doutoramento no âmbito do projecto InAlentejo - A Gestão da Intensidade do Pastoreio face à Valorização do Montado como Sistema de Elevado Valor Natural (ALENT-07-0224-FEDER-001744). Este trabalho foi financiado por fundos FEDER, através do Programa Operacional Factores de Competitividade – COMPETE – e fundos nacionais, através da FCT – Fundação para a Ciência e a Tecnologia no âmbito do projecto Estratégico PEst-OE/AGR/UI0115/2011 e PEst-OE/AGR/UI0115/2011.
Referências bibliográficas
Agouridis, C.T.; Stombaugh, T.S.; Workman, S.R., Koostra, B.K.; Edwards, D.R. e Vanzant, E.S. (2004) - Suitability of a GPS collar for grazing studies. Transactions-American Society of Agricultural Engineers, vol. 47, n. 4, p. 1321–1330. http://dx.doi.org/10.13031/2013.16566 [ Links ]
Altmann, J. (1974) - Observational study of behavior: sampling methods. Behaviour, vol. 49, n. 3, p. 227–266. http://dx.doi.org/10.1163/156853974X00534 [ Links ]
Anderson, D.M.; Estell, R.E. e Cibils, A.F. (2013). Spatiotemporal cattle dataa plea for protocol standardization. Positioning, vol. 4, p. 115–136. http://dx.doi.org/10.4236/pos.2013.41012 [ Links ]
Barbari, M.; Conti, L.; Koostra, B.; Masi, G.; Sorbetti Guerri, F. e Workman, S. (2006) - The use of global positioning and geographical information systems in the management of extensive cattle grazing. Biosystems Engineering, vol. 95, n. 2, p. 271–280. http://dx.doi.org/10.1016/j.biosystemseng.2006.06.012 [ Links ]
Cochran, W.W. e Lord Jr, R.D. (1963) - A radio-tracking system for wild animals. The Journal of Wildlife Management, vol. 27, p. 9–24. [ Links ]
Di Orio, A.P.; Callas, R. e Schaefer, R.J. (2003) - Performance of two GPS telemetry collars under different habitat conditions. Wildlife Society Bulletin, vol. 31, p. 372–379. [ Links ]
Fancy, S.G.; Pank, L.F.; Douglas, D.C.; Curby, C.H. e Garner, G.W. (1988) - Satellite telemetry: a new tool for wildlife research and management (No. FWS-PUB-172). Fish and Wildlife Service, Washington DC. [ Links ]
Ganskopp, D. (2001) - Manipulating Cattle Distribution with Salt and Water in Large Arid-Land Pastures: A GPS/GIS Assessment. Applied Animal Behaviour Science, vol. 73, n. 4, p. 251-262. http://dx.doi.org/10.1016/S0168-1591(01)00148-4 [ Links ]
Gautrais, J.; Michelena, P.; Sibbald, A.; Bon, R. e Deneubourg, J.L. (2007) - Allelomimetic synchronization in Merino sheep. Animal Behaviour, vol. 74, n. 5, p. 1443–1454. http://dx.doi.org/10.1016/j.anbehav.2007.02.020 [ Links ]
Hansen, M.C. e Riggs, R.A. (2008) - Accuracy, precision, and observation rates of global positioning system telemetry collars. The Journal of Wildlife Management, vol. 72, n. 2, p. 518–526. http://dx.doi.org/10.2193/2006-493 [ Links ]
Heezen, K. L. e Tester, J. R. (1967) - Evaluation of radio-tracking by triangulation with special reference to deer movements. The Journal of Wildlife Management, vol. 31, p. 124-141. [ Links ]
Janssen, V. (2013) - GNSS-based animal tracking?: An indirect approach. In: Proceedings of the 18th Association of Public Authority Surveyors Conference (APAS2013), 12-14 Mar 2013, Canberra, Australia. [ Links ]
Laca, E.A. (2009) - Precision livestock production: tools and concepts. Revista Brasileira de Zootecnia, vol. 38, n. esp., p. 123–132. http://dx.doi.org/10.1590/S1516-35982009001300014 [ Links ]
Rutter, S.M.; Beresford, N.A. e Roberts, G. (1997) - Use of GPS to identify the grazing areas of hill sheep. Computers and Electronics in Agriculture, vol. 17, n. 2, p. 177-188. http://dx.doi.org/10.1016/S0168-1699(96)01303-8 [ Links ]
Schlecht, E.; Hülsebusch, C.; Mahler, F. e Becker, K. (2004) - The use of differentially corrected global positioning system to monitor activities of cattle at pasture. Applied Animal Behaviour Science, vol. 85, n. 3, p. 185-202. http://dx.doi.org/10.1016/j.applanim.2003.11.003 [ Links ]
Townshend, A.D.; Worringham, C.J. e Stewart, I.B. (2008) - Assessment of speed and position during human locomotion using nondifferential GPS. Medicine & Science in Sports & Exercise, vol. 40, n. 1, p. 124–132. http://dx.doi.org/10.1249/mss.0b013e3181590bc2 [ Links ]
Turner, L.W.; Udal, M.C.; Larson, B.T. e Shearer, S.A. (2000) - Monitoring cattle behavior and pasture use with GPS and GIS 1. Canadian Journal of Animal Science, vol. 80, n. 3, p. 405–413. http://dx.doi.org/10.4141/A99-093 [ Links ]
Recebido: 2015.10.21
Aceite: 2015.11.25

